ICU Motion Controller
- Jeder Antrieb im OpenCue-Netzwerk wird von einer ICU (Intelligent Control Unit) gesteuert. Dieser flexible Motion Controller kann mit Hardware verschiedener Hersteller verwendet werden und mit Schnittstellen wie CANbus, CANopen, RS485, SSI oder analogen Signalen kommunizieren. Das Aluminiumgehäuse der ICU enthält drei SMD/THT-Platinen:
- CPU: Haupt-CPU mit Ethernet Netzwerk, CAN Netzwerk, IO, Absolut Encoder.
- SFU: Zweit-CPU, Prüfung der Haupt-CPU, mit CAN Netzwerk, IO, Absolut oder Inkremental Encoder
- Reaisplatine: zweikanaliger Notauskreis, der parallel von der CPU und der SFU gesteuert wird.
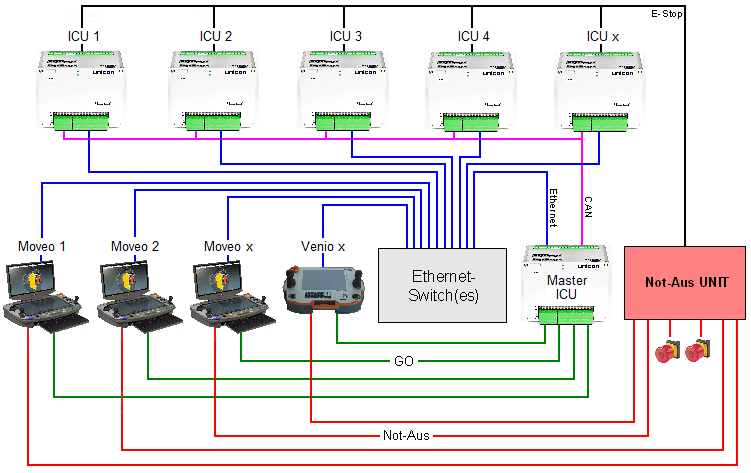
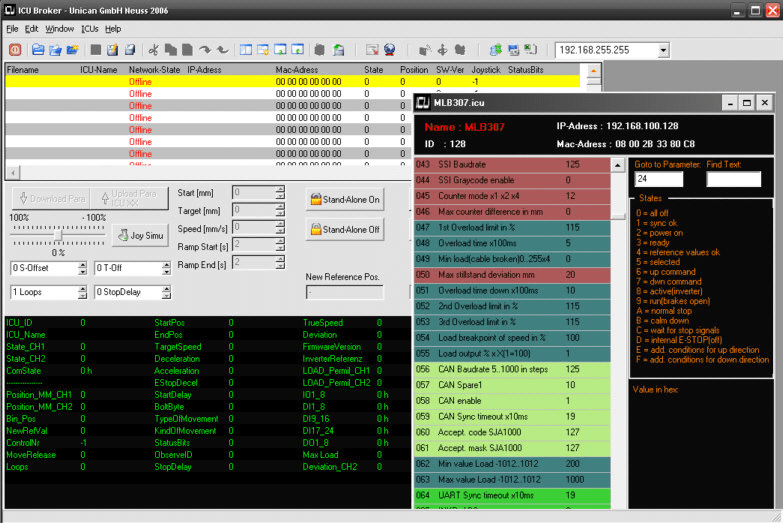
Der ICU ist eine voll integrierte Einheit, die speziell für die Steuerung von Theaterantrieben entwickelt wurde. Die Erkennung von Gruppenpositionen für synchrone Bewegungen wird direkt über das Netzwerk zwischen den ICUs geregelt, um den Engpass eines zentralen Sicherheitsrechners zu vermeiden. Einige Ein- und Ausgänge sind fest mit Funktionen belegt, wie z.B. Wartungsschalter, Umrichter bereit, Umrichter aktiv, Geber, Bremsen und dergleichen. Die anderen sind mit einem PC-basierten Konfigurationsprogramm namens ICU-Broker frei konfigurierbar. Alle Konfigurationsdaten werden in zwei Standard- und zwei gespiegelten EEPROMs in der ICU gespeichert. Die Daten bestehen aus Encoderauflösungsdaten, Netzwerkadresse, Antriebstyp, Endpositionen und IO-Konfigurationen für jeden Zustand, in dem sich der Antrieb befinden kann, was durch eine Zustandsmaschine in jeder CPU gesteuert wird. Der Computer, auf dem ICU Broker läuft, arbeitet innerhalb des Netzwerks und kann an jeden vorhandenen Switch angeschlossen werden. Auf Wunsch kann pro Antrieb eine Statusanzeige installiert werden, auf der u.a. der Zustand des Antriebs, der Ein- und Ausgänge etc. überwacht werden kann.
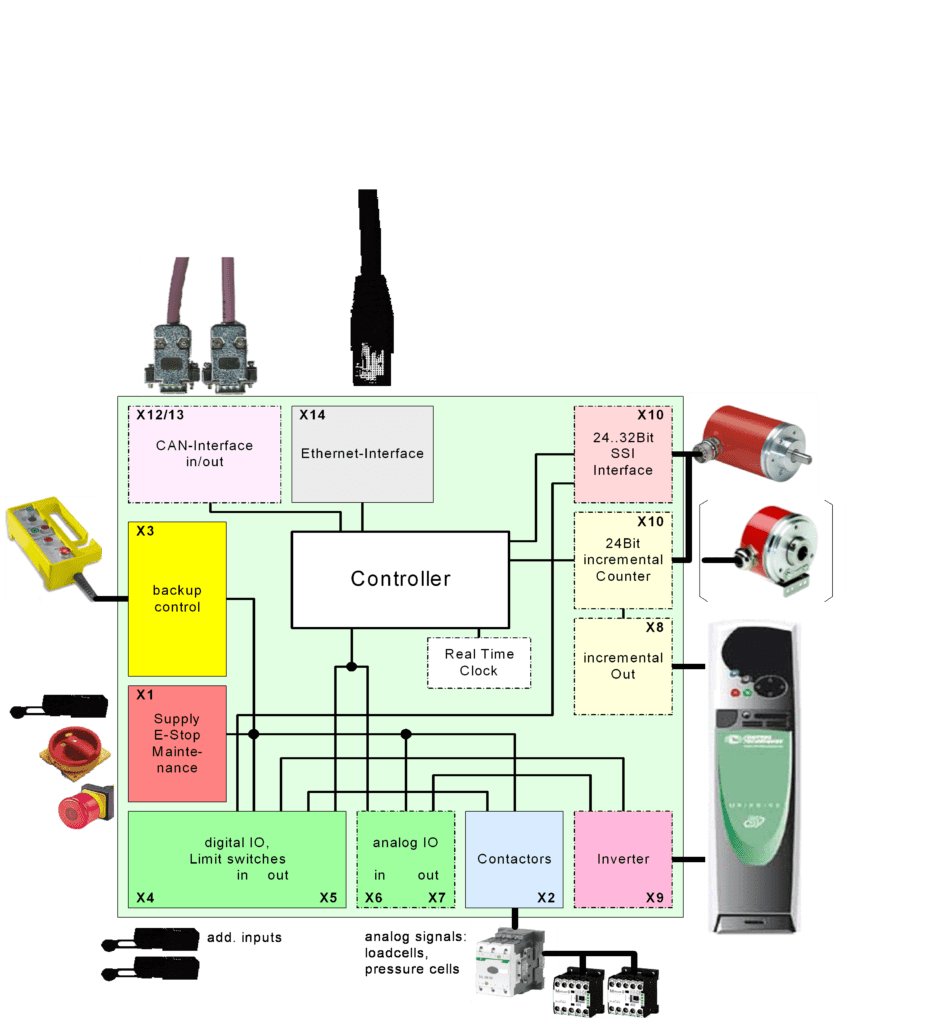
Anschluss-Übersicht ICU:
Die zweikanalige Positionserfassung kann auf zwei konfigurierbare Arten organisiert werden:
- SFU: Inkremental / CPU: Absolut
- SFU: Absolut / CPU: Absolut
Um zu verhindern, dass die inkrementelle Position verloren geht, wird sie 100 Mal pro Sekunde in einem speziellen Hochgeschwindigkeits-ROM auf der SFU gespeichert und beim Neustart aufgerufen.
Die ICU-Schnittstellen:
- 3 galvanisch getrennte Absolut Encoder, 1 galvanisch getrennter Inkremental Encoder
- 1 Ethernet RJ45
- 2 separate CAN Bus Linien
- 1 separate CAN Bus Linie zum Antrieb
- 40 zweikanalige Digital Eingänge
- 12 digitale Ausgänge
- 4 analoge Eingänge (I/U)
- 2 analoge Ausgänge (U)
- 3 Notaus Relais Ausgänge
- 1 Display Verbindung pro Kanal
Konfigurationssoftware ICU-Broker:
Systemübersicht: